Development of mobile sensor for volcanic observation “HOMURA”
Project Gist
Aim to develop the first UGV robot for volcanic exploration.
Keywords
volcanic observation, robot, UGV, remote control
Background, Purpose, and Project Achievements
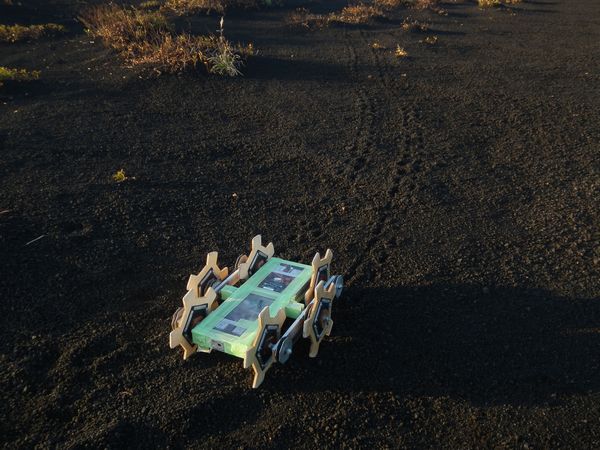
Volcanic monitoring near active crater is necessary to predict volcanic eruption and contribute to disaster prevention. In this study, we aim to develop a UGV robot for volcanic observation, “HOMURA”. In the SPIRTS project, we improved HOMURA prototype we have been developing and do trial campaigns in natural volcanic fields. In Ioyama, Kirishima volcano, Homura carried out volcanic monitoring with an embedded camera during 50 days. It is verified that HOMURA has abilities to practically monitor volcanic activities.
Future Prospects
In future, we will additionally develop sensors for volcanic observation such as volcanic gas sensors (e.g., SO2 and H2S). We plan to assemble a few vehicles of HOMURA, and proceed to improve HOMURA simultaneously with testing it in real volcanic fields. These will make HOMURA be more useful device for volcanic observation.
Figures

Principal Investigator

・KANEKO Katsuya
・Graduate School of Human and Environmental Studies
・Born in Niigata in 1966. Appointed to current position in 2001. The main subject of the study is physico-chemical processes of magma in continental crust. I study it with observation of natural volcanoes and theoretical consideration. With an undergraduate class “Let’s make a robot for volcanic exploration” (pocket seminar) as a start, interested students and I started development of HOMURA and have been improving HOMURA.
・http://www.gaia.h.kyoto-u.ac.jp/~homura/