動的で複雑な環境における人間とロボットの共生を目指した協調
研究スローガン
人間の主体的な活動を支援する柔軟な機械の形態
キーワード
人間・機械協調、ソフトロボティクス、共生
研究背景および目的
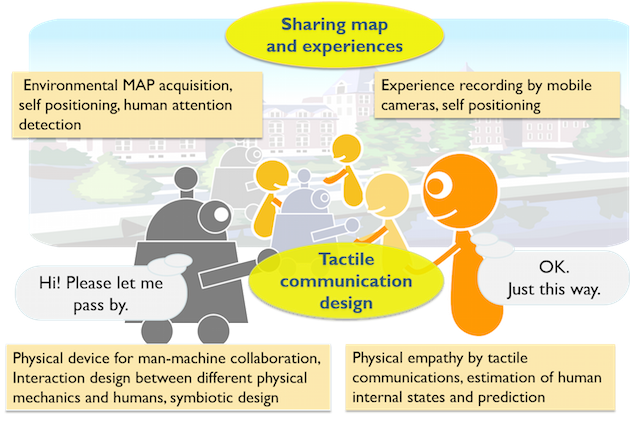
ロボットが人間と共生するためには、人間の特性を解析した上で動作のデザインに取り込むことが必要とされる。例えば、人間との軽い接触を許してもらいながら人混みの中を進む機能等である。このように、複雑な環境における人間とロボットの協調に関して、(a)人間・ロボットに装着したセンサを用いて体験記録を集約するメカニズムを設計・実装すること、(b)安全で人間に不快感を与えないための接触機構を設計・実装することを目的とする。
成果の要約
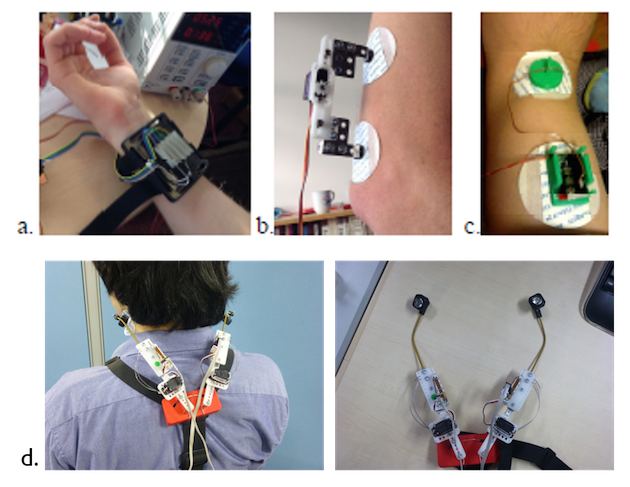
7回のセミナーと研究打ち合わせ、さらに,学生の相互派遣を行いながら、情報交換だけでなく、デバイスの設計、データ取得、遠隔協調実験など、実質的に新しい共同研究を始めた。当初の計画に沿ったものを2つあげるが、その他新しい研究内容も加わりつつある。(1)共同で設計したデバイスを用い、筋肉の状態や生体情報を京都・ブリストル間で伝送した。(2)モバイルカメラ映像による日英両国での体験データ取得とその呈示方法を比較した。
今後の展望
継続的に共同研究を進める基礎を築くことができ、さらに、周辺分野の海外研究者ともつながりができた。テーマを広げながら協力関係を続けていく予定である。その一つとして,EUと日本の国際研究協力型のプロジェクトに応募する予定である。
関連写真・図
代表者情報

・代表者氏名:中村裕一
・所属部局名:学術情報メディアセンター
・自己紹介:1990年京都大学大学院博士課程了。京都大学助手、筑波大学講師、助教授を経て2004年京都大学学術情報メディアセンター教授。現在に至る。博士(工学)。画像理解、映像処理、ヒューマンコンピュータインタラクション自然言語処理などの研究に従事。
・関連URL:http://www.ccm.media.kyoto-u.ac.jp/~yuichi/indexj.html