International and interdisciplinary collaboration for understanding of gait control mechanism in humans and animals
Project Gist
Toward understanding of adaptive gait control mechanism
Keywords
Animal, Gait, Mathematical model, Bifurcation, Robot
Background and Purpose
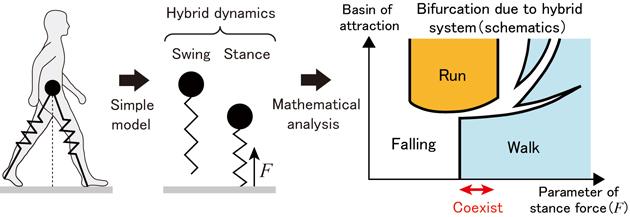
Humans and animals change their gait adaptively depending on the situation by manipulating their complicated and redundant musculoskeletal systems. However, the underlying mechanism for the adaptive gait control remains unclear. In this project, two research groups were constructed based on Mechanical Engineering and Mathematical Science in both Kyoto University and University of Bristol. This project aimed to elucidate the adaptive gait control mechanism by using multiple approaches, such as the measured data analysis, dynamical analysis of mathematical models, and robot experiments, through the international and interdisciplinary collaboration.
Project Achievements
This project improved the understanding of dynamical structures characterized by the gait of animals through the international and interdisciplinary collaboration: clarification of bifurcation structures for animal gait transitions, development of legged robots that show high locomotion performance by using the bifurcation structure, and clarification of dynamic characteristics in the hybrid dynamical systems specific for locomotion. Furthermore, through the international symposium and research meetings, the research collaboration network between Japan and UK was improved and some competitive research funds were obtained.
Future Prospects
To understand the motor control mechanism in animals, findings from various research fields, such as neurophysiology and cognitive science, as well as mechanical engineering and mathematical science, are necessary. Based on the research collaboration network constructed in this project, we would like to develop the network.
Figure
Principal Investigator

・AOI Shinya
・Graduate School of Engineering
・Animals produce skillful motor behavior by manipulating their complicated musculoskeletal systems. However, the underlying mechanism remains unclear. He aims to elucidate the motor control mechanism of various animals from humans, monkeys, dogs, and rats to insects and centipedes by using mathematical models and robots.
・http://space.kuaero.kyoto-u.ac.jp/wp-content/aoi/