生物の歩容制御機序の解明に向けた国際的且つ学際的共同研究
研究スローガン
ヒトや動物の適応的な歩容制御メカニズムを数理的に明らかにする
キーワード
生物、歩容、数理モデル、分岐、ロボット
研究背景および目的
ヒトや動物は複雑な筋骨格系を巧みに動かし、状況に応じて適応的に歩容を選択する。しかしながら、そのメカニズムは不明な点が多い。本研究では、機械工学と数理科学に基づく研究グループを、京都大学とブリストル大学のそれぞれで形成し、大学内と大学間の緊密な連携から、計測データの解析や数理モデルの力学解析、ロボット実験など多角的アプローチを相補的に進めることで、生物の適応的な歩容制御メカニズムの解明を目指した。
成果の要約
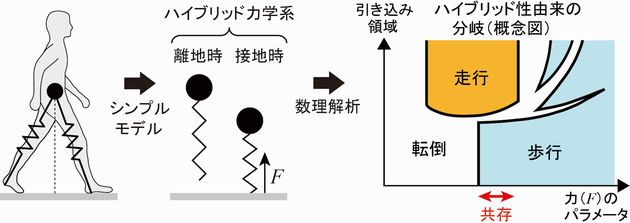
本研究プロジェクトでの国際的且つ学際的共同研究を通して、生物の歩容遷移を説明する分岐構造の解明やその構造を利用した脚ロボットの開発、歩行に特有のハイブリッド力学系に由来する力学構造の解明など、生物の様々な歩容を説明する力学構造の理解が進んだ。また、国際シンポジウムの開催や研究者の交流を通して、日英共同研究ネットワークの発展や競争的外部資金の獲得に繋がった。
今後の展望
生物の優れた運動機能を理解するためには、機械工学や数理科学だけでなく、神経生理学や認知科学など、様々な専門分野の知見が必要である。本研究プロジェクトで形成された共同研究ネットワークを軸にして、国際的且つ学際的な共同研究を発展させていく。
関連写真・図
代表者情報

・代表者氏名:青井伸也
・所属部局名:工学研究科
・自己紹介:生物は複雑な筋骨格系を制御して巧みな運動を実現しますが、その力学原理には多くの謎が残されています。ヒトやサル、イヌ、ラットから昆虫、ムカデに至るまで様々な生物を対象に、数理モデルやロボットを用いてその優れた運動機能の解明に向けた研究を行っています。
・関連URL:http://space.kuaero.kyoto-u.ac.jp/wp-content/aoi/